DeepEP 邮局(一):机内 MoE 通信
随着 DeepSeek 的爆火,Moe 架构已经成了现在超大模型的标配了,它通过将模型参数扩展到海量的“专家”网络中,并为每个输入 Token 动态选择一部分专家进行计算,成功地在控制计算成本的同时,极大地提升了模型容量和性能 。
然而,MoE 的强大威力背后,隐藏着一个巨大的工程挑战:
All-to-All 通信。想象一下,在一个拥有 64 个 GPU 的集群中,每个 GPU 上的数千个 Token 都可能需要被发送到其他任意一个 GPU 上的专家那里进行计算 。这瞬间产生了一场数据传输的 “通信风暴”。
如果采用传统方法,让每个 Token 都与目标专家直接点对点通信,网络将迅速拥塞,通信延迟将成为整个训练或推理流程的瓶颈。
DeepEP 是 DeepSeek 团队开源的一个高性能通信库,它从根基上重新设计了一套优雅、高效的通信范式。本文中,我们用一个邮局模型来帮助大家理解 DeepEP 的核心设计思路。
现在,让我们走进 DeepEP 邮局系统的第一站——“同城邮局”。
这个场景对应的是单台服务器内部的多张 GPU(例如 8 张)之间的通信。它们就像是同一座城市里的 8 家分局,彼此之间有高速公路(NVLink)相连,物流速度极快。但即便如此,如果没有一套精妙的调度系统,8 家分局同时向彼此寄送成千上万的包裹,依然会造成分拣中心的混乱。
DeepEP 的同城邮局系统,将这个复杂的过程拆解为两个核心环节:“晨会规划”和“异步派送”。
1. notify_dispatch:投递前的“晨会”
通信的第一步,是所有邮递员(GPU)在正式派送前召开一次简短而关键的“晨会”。
目的只有一个:
共同制定一份全局一致的 《投递计划总账》,明确每条邮路上包裹应投放的位置,避免数据混乱。
这个“晨会”分为四个步骤,我们结合图来看一下:
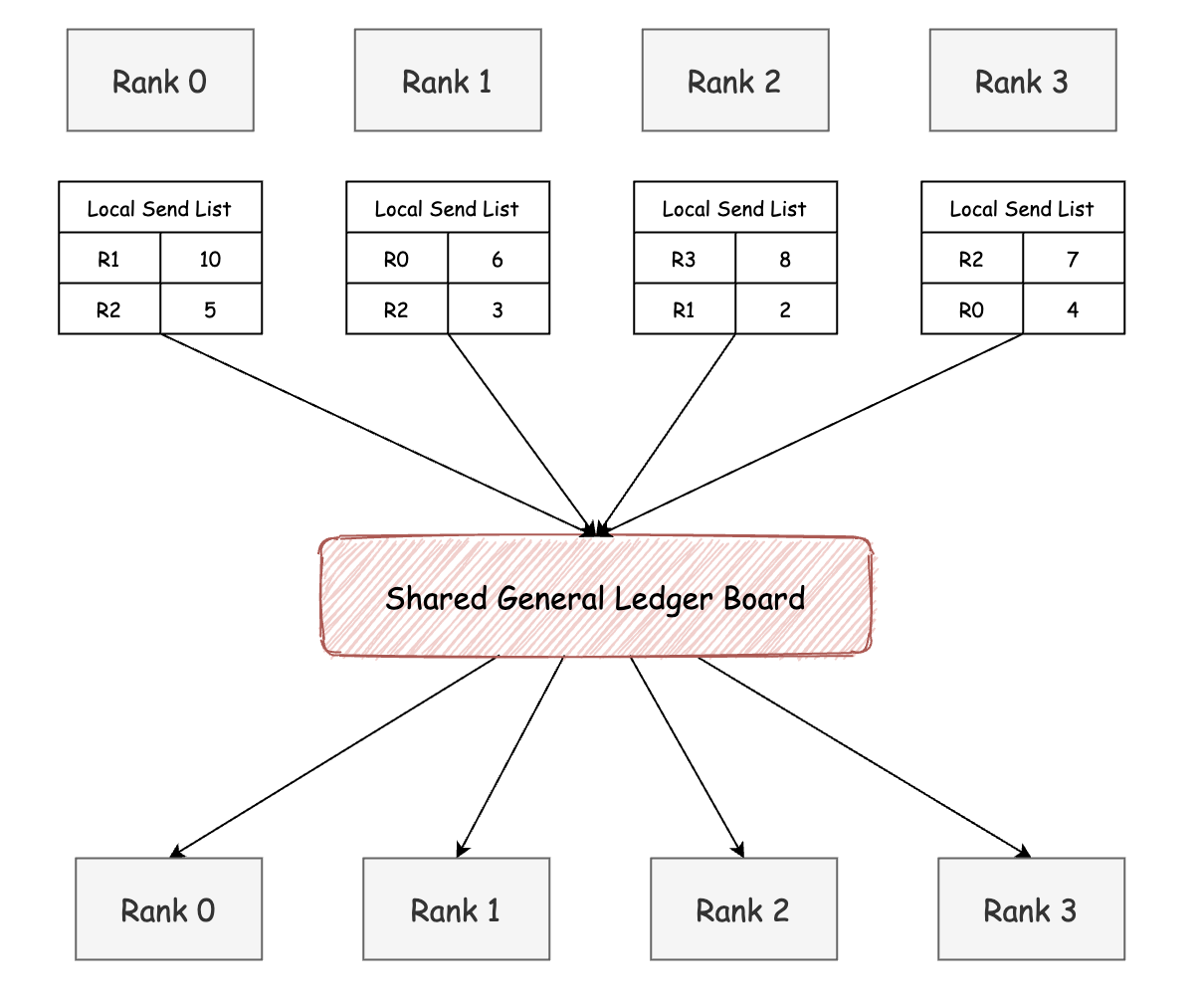
步骤一:Token 数量申报(每个 Rank 自主填写寄信清单)
每个 Rank(如 Rank 0, i, j)本地生成 num_tokens_per_rank: 表示 “我要发给每个 Rank 的 token 数量”,即:寄件数量表
这个数组的长度为 num_ranks,第 j 个位置表示要发给 Rank j 的数量。
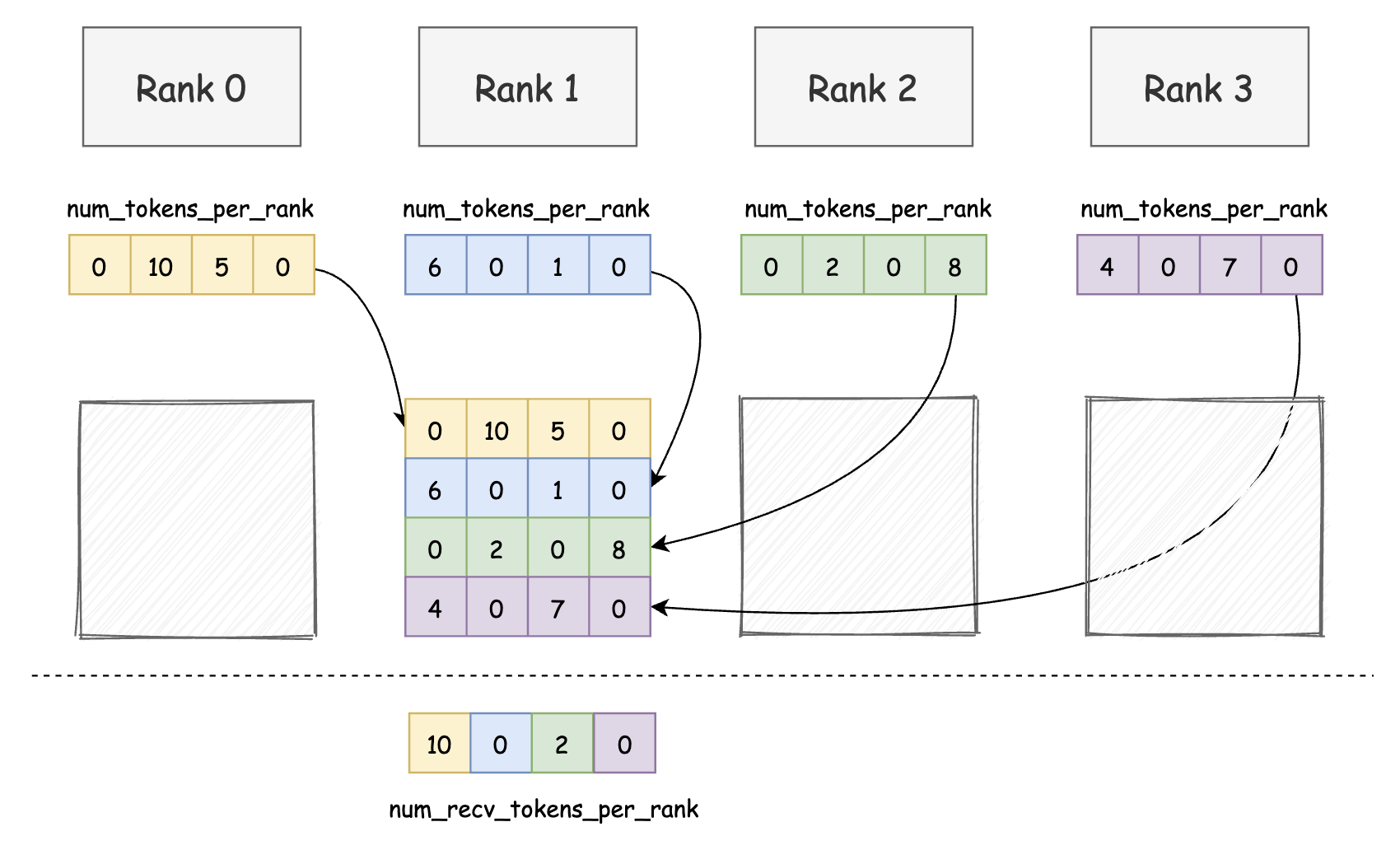
步骤二:数据交换(通过 NVLink 汇总清单)
所有 Rank 将 num_tokens_per_rank 通过 NVLink 网络进行交换,形成一个 2D 矩阵 per_rank_buffer。 第 i 行表示 Rank i 发出的 token 分布, 第 j 列表示 Rank j 将收到的 token 来源分布。
步骤三:收件清单提取(构建 num_recv_tokens_per_rank)
每个 Rank 只关心自己会收到哪些 token,因此提取 per_rank_buffer 的第 i 列。 得到 num_recv_tokens_per_rank,表示“我会从哪些 Rank 收到多少 token”。这份表格就是“我的收件篮计划”,用于后续准确定位数据接收位置。
步骤四:全局同步(确保所有 Rank 的清单一致)
在进入下一步数据发送前,所有 Rank 都需完成“申报 → 汇总 → 提取”的三步流程。故设置 barrier,确保全局通信计划构建完成后再继续派送。
你可能会好奇,上面提到的 barrier 是如何实现的? DeepEP 并未使用重量级的 __syncthreads()(它只能同步一个 block 内的线程),而是实现了一个巧妙的、基于原子操作的自定义 Barrier。
想象一下,邮局门口有一个签到表(barrier_signal_ptrs),每个邮递员都有自己的一行。
- 进入:邮递员 i 来开会时,会在自己的签到表上
atomicAdd一个标记 T,同时在所有其他同事的签到表上atomicSub一个标记 T 。 - 等待:所有人都签到后,每个邮递员 i 就开始盯着自己的签到表。由于他收到了来自其他所有 N-1 个同事的 -T,以及自己的 +T,他的计数值会不断变化。只有当所有人都完成了签到和扣减操作,他的计数值才会最终变回 0。
- 离开:一旦发现自己的计数值归零,就知道“晨会”结束,可以开始派送了。
这个方法利用原子操作的特性,实现了一个轻量而高效的跨 Block 同步机制。
2. dispatch:基于“收件篮”的异步派送
在完成 “晨会” 汇总后,每个 Rank 手里都攥着两份关键的账本:
rank_prefix_matrix:全局投递总账,它告诉你每个 Rank 应该把多少 token 发给谁channel_prefix_matrix:本地分渠道账本,细化了当前 Rank 在每个 Channel 上要发给每个目标 Rank 的 token 分布
这个过程的目标,并不仅仅是把包裹(Token)从 Rank i 送到 Rank j,而是要像一枚精确制导导弹那样,将数据直接送达 Rank j 的最终存储区域 recv_x 中的唯一、正确位置。
为了实现这一点,整个系统协同运转。让我们先来认识一下这个“派送系统”的几大核心部件:
- 目的地清单 (is_token_in_rank): 每一个包裹都随身携带一张“目的地清单”,标注它究竟要寄往哪些邮局(也就是目标 GPU Rank)。我们可以通过
is_token_in_rank数组来快速判断某个包裹是否需要被发送到 Rank j。 - 多通道传输系统 (Channel): 为了提升并行度,DeepEP 会将所有包裹划分给多个“传输通道”(称为 Channel),每条通道独立运行。你可以理解为一个邮局同时开设了多个收发窗口,每个窗口专注处理一部分任务,从而避免拥堵。在源码中, Channel 的数量通常由配置的 SM(流式多处理器)数量决定,例如
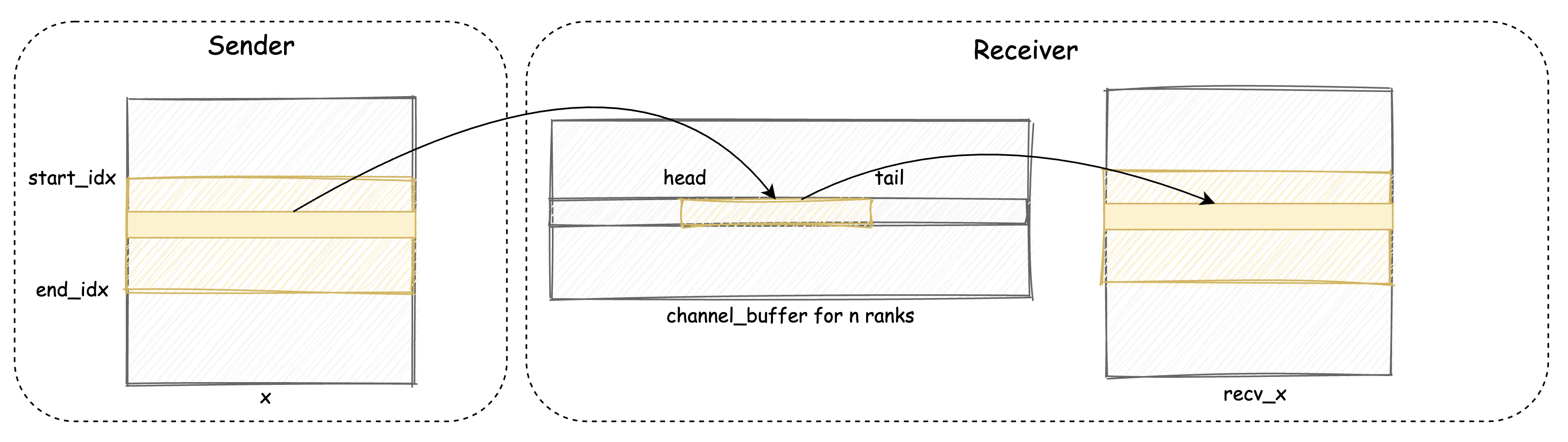
num_sms / 2。 - 临时收件篮 (channel_x_buffers): 每个接收端的每个“收发窗口”后面,都有一排临时的“收件篮”,用来接住其他邮局送来的包裹。这是数据从发送方到接收方的第一个落脚点,一个高效的临时存储区。收件蓝有两个指针:
head和tail,分别指向当前篮子中最前面和最后面的包裹位置。 - 派送小组 (Sender Warp Group): 在每条通道内,派送任务会被分给一个“派送小组”协同完成。这个小组由多个 GPU Warp(一个 Warp 是 32 个线程)组成 。例如,当总共有 768 个线程为 8 个 Rank 服务时,每个 Rank 就会得到一个由 3 个 Warp 组成的派送小组。
- 最终存储货架 (recv_x): 所有包裹的终点,是接收方的主存储区——一块被称为 recv_x 的大货架。包裹从“收件篮”中取出后,会被直接放到这个货架上,按照提前规划好的精确坐标存放,等待后续计算。
现在,所有部件都已就位,我们来还原一个包裹的派送全过程:
Step 1:计算 recv_x 的绝对坐标
Rank i 的 Channel k 准备向 Rank j 发送 token_idx 时,它会拿出两本账本,计算出包裹在 Rank j 的“最终货架” recv_x 上的唯一存放地址 :
全局偏移 = rank_prefix_matrix[i-1][j]:查《全局投递总账》,统计在 i 之前,所有其他 Rank 总共给 j 发了多少包裹。
通道偏移 = channel_prefix_matrix[j][k-1]:查《本地渠道账本》,统计在 i 内部,k 通道之前的所有通道,总共给 j 发了多少包裹。
两者与包裹在当前通道内的序号相加,便得到了它在 recv_x 中的绝对精确坐标。
Step 2:放入“收件篮”,并更新 tail 指针
计算完地址后,Sender 不会直接写入 recv_x,而是先将数据连同其“绝对坐标”信息一起,打包放入 Rank j 对应通道的“临时收件篮” channel_x_buffers 中。
写入前,Sender 会先检查收件篮空间是否足够(通过比较 head 和 tail 指针)。一旦空间可用,它便分块(Chunked)写入一批数据,然后将 tail 指针向前推进,这相当于向 Receiver 发出了“新货已到”的信号。
Step 3:从“收件篮”归位到“永久货架”
Receiver 线程检测到 tail 被推进,便知道有新数据到达。它从收件篮中取出数据,读取随数据附带的“绝对坐标”信息,直接将包裹精准地放入 recv_x 中的对应位置,然后更新 head 指针,释放收件篮的空间。
下面的代码节选自 intranode.cu 中 dispatch kernel 的 Sender 分支,它完整地展现了上述三步流程中的核心部分:
// 遍历当前 Channel 负责的所有 token
for (int64_t token_idx = token_start_idx; token_idx < token_end_idx; ) {
// --- Step 1 & 2 的前置环节:流控,等待“收件篮”空位 ---
while (lane_id == 0) {
// 通过比较 head 和 tail,计算已用空间
int num_used_slots = cached_channel_tail_idx - ld_volatile_global(channel_head_idx.buffer());
// 如果剩余空间足够放下下一个 chunk (num_max_send_tokens),则跳出等待
if (num_recv_buffer_tokens - num_used_slots >= num_max_send_tokens)
break;
}
__syncwarp(); // 小组内所有线程同步,确认空间可用
// --- Step 2:构造一个 chunk 并放入“收件篮” ---
int chunk_token_idx = 0;
while (chunk_token_idx < num_max_send_tokens && token_idx < token_end_idx) {
// 查询“目的地清单”,如果这个 token 不需要发给当前目标 rank,则跳过
if (!is_token_in_rank[token_idx * kNumRanks + responsible_rank]) {
token_idx++;
continue;
}
// 获取一个空的“收件篮”位置 (slot)
int dst_slot_idx = (cached_channel_tail_idx++) % num_recv_buffer_tokens;
// 将 token 数据(x, topk_idx, topk_weights等)写入收件篮的 dst_slot_idx 位置...
// ... (此处为高性能的 UNROLLED_WARP_COPY 等拷贝操作) ...
chunk_token_idx++, token_idx++;
}
// --- Step 2 的收尾:推进 tail 指针,正式通知接收方 ---
// 小组内先同步一次,确保所有人都完成了拷贝
asm volatile("bar.sync %0, %1;" :: "r"(responsible_rank), "r"(num_threads_per_rank));
if (send_warp_id_in_rank == 0 && lane_id == 0)
// 每个派送小组的“领队”线程(warp 0, lane 0)负责更新 tail,避免冲突
st_release_sys_global(channel_tail_idx.buffer(), cached_channel_tail_idx);
}
P2P 与 IPC 机制
读到这里不知道大家有没有一个问题:
DeepEP 里面的通信方式都是异步去做的,他不依赖 CUDA 的同步机制,也不依赖 nccl 去做通信。为什么它可以不依赖传统的 nccl 通信就可以实现跨 GPU 的通信呢?
答案是 NVIDIA 的 P2P 技术 和 CUDA 的 IPC (Inter-Process Communication) 机制。
这是我在理解 DeepEP 的通信逻辑时最震撼的一点:我们平时提到「多卡通信」,大多数人第一反应是 Broadcast、AllReduce、Send/Recv,但在 DeepEP 里面,根本看不到这些。取而代之的,是一套更底层、更“原始”的方式:直接操作对方的显存。
NVIDIA 为此提供了两个关键能力:
首先是 P2P(Peer-to-Peer)通信。只要你的机器中 GPU 之间通过 NVLink 或高版本 PCIe 互联,你就可以启用 GPU 之间的“互访权限”。开启之后,一个 GPU 访问另一个 GPU 的显存就像 CPU 访问另一个 NUMA 节点的内存一样,地址可能远了一些,但完全是合法的、可写的。
其次是 IPC(Inter-Process Communication)机制。这个机制的名字虽然叫“进程间通信”,但在实际使用中,它更像是一个“显存共享协议”:你在某张卡上 cudaMalloc 出一段显存,然后调用 cudaIpcGetMemHandle,CUDA 会给你生成一个可以“外发”的 handle,类似一张门禁卡。别的 GPU 拿到这张卡后,就可以用 cudaIpcOpenMemHandle 得到一个“合法”的指针,指向那段显存。
这时候就妙了:你在 GPU-0 上写入这个指针,实际上写入的是 GPU-1 的物理显存,但因为有 NVLink 和 P2P 打底,这个写入不仅合法,还非常高效。没有任何 NCCL,也不需要 memcpy,就是一次合法的写操作而已。
DeepEP 在启动阶段,每张卡都会:
- 分配一段通信缓冲区
- 获取这段显存的 ipc 句柄
- 把这个句柄广播给其他卡
- 其他卡通过这个句柄打开对应的显存地址
最后,每张卡都拥有了一个指针数组 buffer_ptrs[i],里面每个指针都指向 Rank-i 的通信缓冲区。
3. combine:带回执的返程之旅
当各个邮局的专家(Experts)处理完收到的包裹(Tokens)后,他们的工作并未结束——还得确保这些包裹被准确无误地送回到最初的寄件人手中。但这次回来的操作,已经不仅仅是简单的“退货”,更像是一场基于“发货回执”的精准回收与合并。
在介绍 combine 的细节之前,我们不得不提到 dispatch 阶段留下的一份关键“发货回执单”——send_head 张量。
邮递员 i 给邮局 j 投递包裹(token_idx)时,他同时会在自己的记事本上记录一条详细的投递信息,比如“寄了哪个包裹,在收件篮(channel_x_buffers)里的具体哪一号位置(slot index)”。这个位置信息被保存到 send_head[token_idx, j] 中。因此,send_head 就像一张高精度的“发货清单”,明确写着:
“我的哪个包裹,发给了谁,放在了他家收件篮的第几号位。”
正是这份回执单,让 combine 阶段能保证无缝地取回每一个寄出的包裹。
combine 阶段:角色的神奇反转
在 combine 阶段,整个系统的角色发生了一个戏剧性的反转。派送员变成了回收员,寄件人变成了接收处理结果的人。
当 combine 阶段启动时,派送的 Sender 角色完成使命,摇身一变成了 Receiver,等待将包裹的处理结果逐一收回。DeepEP 中,这个“回收小组”由 24 个 Warp 线程(kNumThreads = 768,即 768 ÷ 32 = 24 Warp)组成。
这 24 个 Warp 的第 0 个 Warp (协调员)不亲自搬运包裹。他的唯一任务,是监控所有“包裹处理员”的工作进度,并在确保安全的前提下,统一更新“收件篮”的 head 指针,通知上游可以继续发货。
剩下 23 个 Warp (处理员)负责根据“发货回执单”,并行地从各个返程通道的“收件篮”中取出包裹,并将其内容累加(Reduce)到最终的存储货架 recv_x 上。
// 源码节选自:csrc/kernels/intranode.cu -> combine 函数
// is_sender 为 false 的分支,即 combine 的接收端
// 角色分工:根据 warp_id 判断身份
if (thread_id < 32) {
// --- “核查员” (Coordinator, warp_id = 0) 的工作 ---
// ... (循环监控,直到所有处理员都完成任务)
while (true) {
// 检查所有“处理员”是否都已退休
bool retired = true;
#pragma unroll
for (int i = 1; i < num_recv_warps; ++i)
retired = retired && warp_retired[i]; // warp_retired 是处理员完成任务的标志
if (retired) break;
// 收集所有“处理员”的进度报告 (warp_channel_head_idx)
int min_head = std::numeric_limits<int>::max();
#pragma unroll
for (int i = 1; i < num_recv_warps; ++i)
min_head = min(min_head, warp_channel_head_idx[i][lane_id]);
// 如果进度有更新,则安全地推进全局 head 指针
if (min_head > last_head)
st_relaxed_sys_global(channel_head_idx_ptr, last_head = min_head);
}
} else {
// --- “包裹处理员” (Receiver, warp_id > 0) 的工作 ---
// 遍历自己负责的 token
for (int64_t token_idx = token_start_idx + recv_warp_id - 1; token_idx < token_end_idx; ...) {
// 1. 读取“发货回执单”
int expected_head = ld_nc_global(send_head + token_idx * kNumRanks + lane_id);
// 2. 等待返程包裹到达(核对回执)
while (channel_tail_idx[lane_id] <= expected_head && expected_head >= 0) {
// 不断检查 tail 指针,直到它超过了回执单上记录的位置
channel_tail_idx[lane_id] = ld_acquire_sys_global(channel_tail_idx_ptr);
// ... (超时保护)
}
// 3. 从“收件篮”取货并累加到“最终货架”
// ... (高性能的 reduce 和 copy 操作) ...
// 4. 向“核查员”汇报自己的工作进度
warp_channel_head_idx[recv_warp_id][lane_id] = expected_head + 1;
}
// 所有任务完成,举手“退休”
if (lane_id == 0) warp_retired[recv_warp_id] = true;
}
4. 总节
至此,我们已经完整地剖析了 DeepEP 在单节点内部实现 All-to-All 通信的全过程。让我们再次回顾这个精巧的“同城邮局”系统是如何运作的:
- 规划先行 (
notify_dispatch):一切始于“晨会”,所有 GPU 通过一次高效的自定义 barrier 同步,共同制定出两本精确到字节的《全局投递总账》和《本地渠道账本》。这确保了后续所有的派送都有据可查,不会出现地址冲突。 - 精准派送 (
dispatch):派送任务被分解到多个并行的“派送渠道”中,每个渠道的“派送小组”根据账本计算出每个包裹在最终“货架”(recv_x)上的绝对坐标。数据被分块(Chunked)地放入临时的“收件篮”(channel_x_buffers),并通过轻量的 head/tail 指针进行异步流控,最终被精准归位。 - 回执回收 (
combine):返程之旅则依赖于派送时留下的“发货回执单”(send_head)。回收小组中的“包裹处理员”和“首席核查员”分工明确,协同工作,在确保所有数据都准确返回后,才进行合并计算,完成了整个通信的闭环。
整个过程,DeepEP 将一个看似混沌的 All-to-All 问题,通过 “预先全局规划、任务并行分解、异步流控、精准地址计算” 等一系列组合拳,转化成了一套高度有序、无锁、且能极致利用 NVLink 带宽的高效数据流。
在下一篇文章中,我们将探索 DeepEP 设计中最为闪亮的精华所在——Inter-Node 跨节点通信。届时,我们将揭秘其巧妙的 “L 形路由” 策略,看它是如何解决跨节点通信的延迟和带宽瓶颈。