静态图执行过程
tip
本文在阅读 文章 时所做的笔记,主要是对静态图组网过程的理解。
全文结合 PaddlePaddle 的源码进行说明
在上一篇文章中,我们已经对 PaddlePaddle 的静态图组网过程有了一个大致的了解,这一篇文章我们将对静态图执行过程进行分析。 接下来我们从 Python 侧和 C++ 侧两个入口进行分析。
Python 侧入口
在组网完成以后,需要执行器执行 Program 进行训练。首先需要初始化一个 Executor,然后再通过 executor 运行 startup_program,进行参数的初始化,正式开始对网络的训练。 对应代码如下:
# Executor 只需要在静态图模式下使用
paddle.enable_static()
# 设置运行的设备
# use_cuda = True
# place = paddle.CUDAPlace(0) if use_cuda else paddle.CPUPlace()
# exe = paddle.static.Executor(place)
# 如果不设置place,PaddlePaddle会自动选择一个默认的设备
exe = paddle.static.Executor()
train_program = paddle.static.Program()
startup_program = paddle.static.Program()
with paddle.static.program_guard(train_program, startup_program):
data = paddle.static.data(name='X', shape=[None, 1], dtype='float32')
hidden = paddle.static.nn.fc(data, 10)
loss = paddle.mean(hidden)
paddle.optimizer.SGD(learning_rate=0.01).minimize(loss)
# 运行一次startup_program,初始化参数
# 不需要优化/编译 startup_program
exe.run(startup_program)
# 直接运行主程序,不需要编译
x = numpy.random.random(size=(10, 1)).astype('float32')
loss_data, = exe.run(train_program, feed={"X": x}, fetch_list=[loss.name])
# 或者也可以先编译主程序,然后再运行,参考 `CompiledProgram` 获取更多信息
compiled_prog = paddle.static.CompiledProgram(
train_program)
loss_data, = exe.run(compiled_prog, feed={"X": x}, fetch_list=[loss.name])
note
直接运行主程序和先编译主程序再运行有什么区别?
首先先解释一下什么是 startup_program, startup_program 是用来初始化参数的,比如初始化权重、偏置等。然后在进行后续的 run 操作。 在后续的 run 操作中,分为了俩种,一种是直接运行主程序,一种是先编译主程序再运行。先编译主程序的操作主要目的就是将你组好的网络,转换成底层的一些其他表达,在这个过程中会对网络去做很多的优化,比如去除一些不必要的计算,去除一些不必要的变量,去除一些不必要的操作等等。这些优化都是为了提升运行的效率。所以在运行的时候,如果你的网络比较复杂,建议使用 CompiledProgram 进行编译,这样可以提升运行的效率。
exe = Executor(place) 的作用是初始化一些变量,没有特别重要的内容,特别是这里并没有真正的创建执行器。 下面直接来看 run 方法的执行流程。
# https://github.com/PaddlePaddle/Paddle/blob/develop/python/paddle/fluid/executor.py#L1449
Executor.run
-> Executor._run_impl
-> _ExecutorCache._get_program_and_executor
-> nex_exe.run
note
Executor、StandaloneExecutor、ParallelExecutor 有什么区别?
这三个执行器其实是 Paddle 开发历史中的产物,Executor 是最初的执行器,后来为了支持多卡训练,又引入了 ParallelExecutor,后来为了统一接口,又引入了 StandaloneExecutor。StandaloneExecutor 也叫做新执行器,老的执行器已经不再推荐使用了,会在未来的版本中被移除。
Executor._run_impl 中有比较复杂的分支选择逻辑,会根据不同的配置或参数选择不同的执行器,如 Executor、StandaloneExecutor、ParallelExecutor,这里只介绍 StandaloneExecutor 的执行过程。其对应的相关代码为:
# Executor._run_impl
# https://github.com/PaddlePaddle/Paddle/blob/develop/python/paddle/fluid/executor.py#L1633
if self._enable_interpreter_core and _can_use_interpreter_core(program, self.place):
feed = self._update_feed(program, feed) # 如果Program中不包含相应的feed,就在这里去掉
program, new_exe = self._executor_cache.get_program_and_executor(
program, feed,
fetch_list, feed_var_name,
fetch_var_name, self.place, scope,
)
#添加feed相应的variable并设置其值
self._feed_data(program, feed, feed_var_name, scope)
...
return new_exe.run(
scope, list(feed.keys()), fetch_list, return_numpy
)
note
https://github.com/PaddlePaddle/Paddle/blob/develop/python/paddle/fluid/executor.py#L1484
里面的不同 Program (program._pipeline_opt、program._heter_pipeline_opt 等)是用来干什么的?
program._pipeline_opt 和 program._heter_pipeline_opt 都是 Paddle 里面用来处理流水线并行的,是在使用多机训练的时候用的。 program 中有很多类似这样的属性,根据这些属性就可以根据不同的业务模块,选择不同的执行体系。
对于 Program 和 Executor,是存在 cache 机制的,对于同一个 Program,我们会缓存它的执行器,缓存的 key 结构如下: program.desc.cached_hash_str() + _get_program_cache_key(feed, fetch_list) 这里 key 分为两部分,第一部分是 ProgramDesc 中 cached_hash_str 字段。
// https://github.com/PaddlePaddle/Paddle/blob/develop/paddle/fluid/framework/program_desc.cc#L260
desc_.SerializePartialToString(&serialize_str); //这里是ProgramDesc的protobuf序列化得到的字符串
cached_hash_str_ = std::to_string(XXH64(serialize_str.c_str(), serialize_str.size(), 1));
第二部分是程序接收的输入和输出,_get_program_cache_key(feed, fetch_list)。
每次调用 executor.run 的时候,如果 ExecutorCache(LruCache) 没有命中,就需要新建一个出来:
def _get_program_and_executor(self, cached_data):
# ... 略去一些参数初始化和其他执行器分支
program = _add_feed_fetch_ops(program=inner_program,
feed=feed,
fetch_list=fetch_list,
feed_var_name=feed_var_name,
fetch_var_name=fetch_var_name,
use_fetch_v2=True)
enable_inplace = True if build_strategy is None or build_strategy.enable_inplace else False
enable_addto = True if build_strategy is not None and build_strategy.enable_addto else False
if enable_inplace or enable_addto:
# inplace should skip feed and fetch var
skip_var_names = eval(_get_program_cache_key(feed, fetch_list))
_apply_inplace_addto_pass(program, enable_inplace, enable_addto,
skip_var_names)
new_program = program.clone()
new_exe = _StandaloneExecutor(place, new_program, scope)
return new_program, new_exe
在新建过程中,有两个对 Program 的修改:
- 添加了
feed和fetch op。对每个feed变量,都会添加一个feed op到global block;对每个fetch变量,都会添加一个fetch变量到global block。 - 对
Program开启了inplace和addto两个pass。这两个pass均与 inplace`相关。
note
feed 和 fetch 是用来做什么的
feed 和 fetch 是提供给用户的输入和输出的接口,用户可以通过 feed 和 fetch 来指定输入和输出的变量。 在用户层面的代码中会指定 feed 和 fetch 的变量,然后在底层的执行器中会根据这些变量来添加 feed op 和 fetch op。
x = numpy.random.random(size=(10, 1)).astype('float32')
loss_data, = exe.run(train_program, feed={"X": x}, fetch_list=[loss.name])
比如上面的代码,feed 中的 X 就是 feed 变量,fetch_list 中的 loss.name 就是 fetch 变量。
到这里,程序在 python 侧的执行就结束了,接下来会调用 StandaloneExecutor 在 C++ 侧运行 Program。
总的来说,在 Python 侧,主要是创建 Program 和 Executor,然后调用 Executor.run 运行 Program。
C++ 侧入口
静态图相关概念
在解释静态图的执行过程之前,先来梳理一下之前涉及的一些与静态图相关的概念。首先对于静态图表示来说,最重要的是这些 Desc 后缀的类,它们是静态图的表示核心。在 Python 侧,我们为这些 Desc 定义了相应的接口类,便于在 python 侧进行组网操作。
在静态图执行的时候,这里的 OpDesc 和 VarDesc 就不能直接拿来使用了。因为它们缺少了重要的运行时信息,VarDesc 是不持有内存的,也就不保存数据。OpDesc 中是没有 kernel 相关的信息的,因而也不能得到具体的运算逻辑。运行时我们需要接触的两个对应的类型分别是 Variable 和 OperatorBase,它们分别持有了数据和计算逻辑。执行器的关键一步就是从这里静态图的描述信息到运行信息的转化。
OpFuncNode/Instruction 是新执行器在执行期间会用到的类,在概念上可以将其等价理解为 OperatorBase,不同在于附加了执行器运行期间需要的上下文信息
StandaloneExecutor
执行器的任务是根据给定的 ProgramDesc,执行其中包含的 Op,返回最后的结果。执行器需要处理的事情:
- 变量(Variable)的创建、管理与释放
- 算子(OperatorBase)的创建、调度执行
现存的执行器有 Executor、PE 和新执行器。这里我们以新执行器的执行流程为主,其他执行器目前都不推荐使用了。新执行器的正式名称是 StandaloneExecutor。
class StandaloneExecutor {
public:
StandaloneExecutor(const platform::Place& place, const ProgramDesc& prog);
~StandaloneExecutor() {}
private:
platform::Place place_;
const ProgramDesc& prog_;
std::unordered_map<std::string, std::shared_ptr<InterpreterCore>> interpretercores_;
}
其中 place 是指定的运算设备,prog_ 是新执行器需要执行的 Program,InterpreterCore 是调度的核心。 这里的 interpretercores_ 类型是std::unordered_map<std::string, std::shared_ptr<InterpreterCore>>,用于缓存 InterpreterCore。缓存的 key 的结构是 feed:$feed,fetch:$fetch,scope:$scope
note
InterpreterCore 是一个解释器,它可以解释 PaddlePaddle 的程序并执行它们。InterpreterCore 还可以将程序转换为可执行的代码,并将其传递给底层的执行引擎。
StandaloneExecutor 首先尝试从 interpretercores_ 中查询是否已经存在相应的核心,如果没有就新建一个,否则返回已存在的核心。并在 run 方法中调用该核心执行 Program,因此新执行器的核心类其实是 InterpreterCore,StandaloneExecutor 本身的作用很小。
InterpreterCore 的主要成员变量如下:

InterpreterCore 的 run 方法实现如下:
paddle::framework::FetchList InterpreterCore::Run(
const std::vector<std::string>& feed_names,
const std::vector<phi::DenseTensor>& feed_tensors) {
SetDeviceId(place_); // 指定运行设备,新执行器本身是只支持单机单卡运行Program的
CheckCUDAGraphBeforeRun(feed_names); //检查是否已经启动了CUDA图模式
#ifdef PADDLE_WITH_MKLDNN
platform::AttachPointerHashToMKLDNNKey(this, place_); // 附加指针哈希到MKLDNN key中
#endif
bool is_build = is_build_;
Prepare(feed_names, feed_tensors, is_build); // 准备运行所需的上下文信息
if (is_build) {
RunImpl(); // 当前Program应该是被动态图构建出来的,运行它的执行计算图的具体实现
}
if (HasLocalScope()) {
ClearLoDTensorArrayInLocalScope(); // 在本地作用域中清除LoD Tensor Array
}
// 将Fetch Tensor返回
auto* fetch_var = local_scope_->FindVar(interpreter::kFetchVarName); // 在本地作用域中查找Fetch Tensor
if (fetch_var) {
auto fetch_list = std::move(*fetch_var->GetMutable<framework::FetchList>()); // 获取Fetch Tensor
#ifdef PADDLE_WITH_CUDA
// 如果CUDA图模式已经启动
if (platform::IsCUDAGraphCapturing()) {
// 获取数据时会出错
PADDLE_ENFORCE_EQ(fetch_list.empty(),
true,
platform::errors::InvalidArgument(
"Cannot fetch data when using CUDA Graph."));
}
#endif
return fetch_list; // 返回Fetch Tensor
} else {
return {}; // 如果没有获取到Fetch Tensor则返回空列表
}
}
InterpreterCore 的执行有两个分支,一种是尚未 build 执行 build 过程,另一种是 build 完成直接执行 instruction 的 list。需要说明的是,在 build 过程中,会顺序的调用每个 op run 一次,因此对于一个刚创建的 InterpreterCore,不需要连续调用两次 run 方法,一次 build,一次运行。 最后 return 的时候,在 scope 中查找名叫 fetch 的变量,返回该变量给用户。
note
为什么需要这两个分支?这俩个分支有什么不一样的作用吗?
我们执行器的执行模式是先通过一次的预处理,在预处理的时候我们把很多可以复用的信息缓存下来,这样在后续的执行过程中就可以直接使用了,这样就可以减少很多重复的计算,提升执行效率。 如果不进行预处理,在跑网络的时候,很多事情都是需要边跑边做的,这样就会导致执行效率不高。但是对于网络的训练来说,我们每一轮的网络其实是一样的,只是输入的数据不一样,所以我们可以在第一轮的时候把这些可以复用的信息缓存下来,后续的执行就可以直接使用了。这里面最直接相关的就有 静态选Kernel 。原本的执行体系里面给 Op 去选 Kernel 也是一个耗费时间的问题,所以在预处理的时候如果可以把 Kernel 都选好,那么后续的执行就可以直接使用了。w
新执行器的执行过程过程可以分为两步:
- 预分析阶段:静态化运行时信息,分析变量生命周期,Op 的依赖分析
- 调度执行阶段:异步调度、跨流同步、算子执行、依赖更新、变量回收
预分析阶段
tip
为什么需要预分析的阶段?
预分析的主要核心作用就是:考虑执行一个 Op 需要哪些信息?哪些信息是可以复用的。
对比最基础的 Executor 的实现,它的执行流程可以划分为以下几个步骤:
- 调用
OpRegistry::CreateOp(OpDesc)为每个 Op 实例化对应的OperatorBase - 调用
PrepareUnusedVars确定 Block 中的变量应该在第几个 Op 执行结束后回收 - 为 Block 中的每个 VarDesc 实例化对应的 Variable ,这些 Variable 尚未持有真正的数据
- 按顺序调用 Op->Run 方法,同时在 Op 执行结束后回收不需要用到的变量
- 创建
RuntimeContext:用于在 scope 中查找 op 需要的输入和输出变量 - 创建
ExecutionContext:用于kernel的选择和分发 - 选择运算 kernel
- 根据
GetExpectedKernelType进行数据类型转换 - 创建
RuntimeInferShapeContext:用于推导变量的维度和类型 - 调用
infer_shape - 执行
kernel进行运算
上述过程中的第三步和第四步,每次 Executor 运行的时候都需要执行一遍,这里面很多的操作都可以通过缓存的方式避免重复运算。预分析的过程就是静态化这些运行信息,加速执行的过程。
预分析的第二个作用是为了并行调度和变量回收的准备工作。
// 为Block中的每个VarDesc实例化对应的Variable,这些Variable尚未持有真正的数据,对应 Executor.3
paddle::framework::interpreter::BuildVariableScope(
block_, execution_config_, &var_scope_);
// 按顺序调用Op->Run方法,并缓存部分信息,对应Executor.4
std::vector<paddle::framework::OpFuncNode> op_func_nodes;
paddle::framework::interpreter::BuildOpFuncList(
place_,
block_,
execution_config_.skip_gc_vars,
&op_func_nodes,
&var_scope_,
execution_config_,
HasLocalScope(),
static_build_);
// 对于用户输入的变量,在 var_scope_ 中将他们设置为跳过 inplace 相关判断,避免修改用户的输入变量
SetFeedVarsInplaceSkip(feed_names);
// 分析并确定op间的依赖关系,记录gc信息,可以对应Executor.2
Convert(&op_func_nodes);
UpdateSyncOpNum();
if (static_build_) {
RunImpl();
}
is_build_ = true;
当前需要处理的 Program
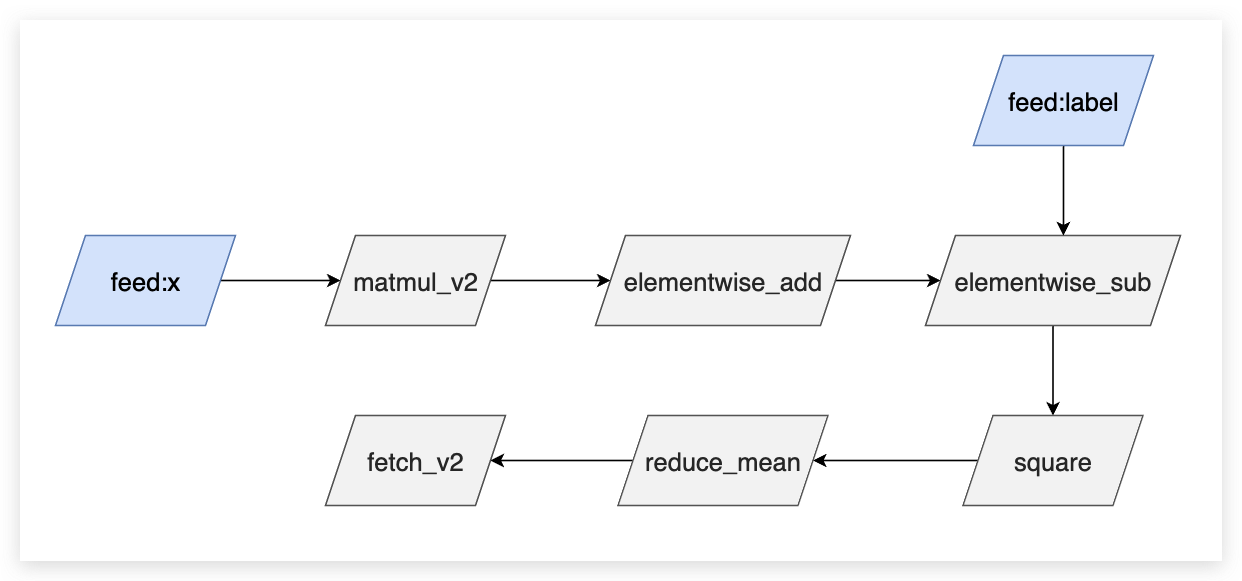
note
这个图其实不是一个完成的 Program , 图里面只画出了 Op 的依赖关系,并没有详细的画出每一个 Op 的输入输出变量。
上述代码里面有几个核心的点,分别是 BuildVariableScope、BuildOpFuncList、Convert。 下面分别介绍这三个函数的作用。
BuildVariableScope
note
为什么需要 BuildVariableScope ?
一个网络在执行的时候有几个关键点,一个是计算(Op),第二个就是数据,数据也就是变量。第三个就是数据在运行的时候,管理数据的东西叫做 Scope。所以在第一轮构建的时候,就需要把这几个东西构建起来。 现在的 Scope 都被处理成了列表的形式,也就是处理成 vector 的类型,这样我们在索引的时候就非常快。 但是这个东西其实现在也没有在用了,我们现在用回了最原始的 Scope,因为我们的执行器是会做缓存的,所有的变量都有指针,这些指针都会缓存到了 context 里面(Op 在执行的时候都是通过一个 context 的数据结构去存储它)。 Op 在计算的时候直接从 Context 里面取就可以了。 BuildVariableScope 这部分的代码在后续也会被清理掉。
BuildVariableScope 的内部核心代码如下:
auto inner_scope = var_scope->GetMutableScope();
// created in var_scope.scope_ , and other scope is created in local scope.
// 这个 scope 是新执行器初始化时传入的 scope
Scope* local_scope = execution_config.create_local_scope
? var_scope->GetMutableLocalScope()
: var_scope->GetMutableScope();
// 遍历创建 block 的所有 VarDesc 并实例化为 Variable,加入到 scope 中
for (auto& var_desc : block.AllVars()) {
auto var_name = var_desc->Name();
if (var_name == framework::kEmptyVarName) {
continue;
}
if (var_desc->Persistable() ||
execution_config.force_root_scope_vars.count(var_name)) {
// 原则上,我们应该把所有可训练的参数放在全局作用域中,也就是作用域树的根。
// 有些情况下,比如量化会在全局范围内查找这些参数。
const Scope* ancestor_scope = inner_scope;
while (ancestor_scope->parent()) {
ancestor_scope = ancestor_scope->parent();
}
auto* ptr = const_cast<Scope*>(ancestor_scope)->Var(var_name);
// 如果 var 存在于 scope 中并且类型正确
// initializvariable 将不会创建一个新变量。
InitializeVariable(ptr, var_desc->GetType());
} else {
auto* ptr = local_scope->Var(var_name);
InitializeVariable(ptr, var_desc->GetType());
}
var_scope->AddVar(var_name, var_desc);
}
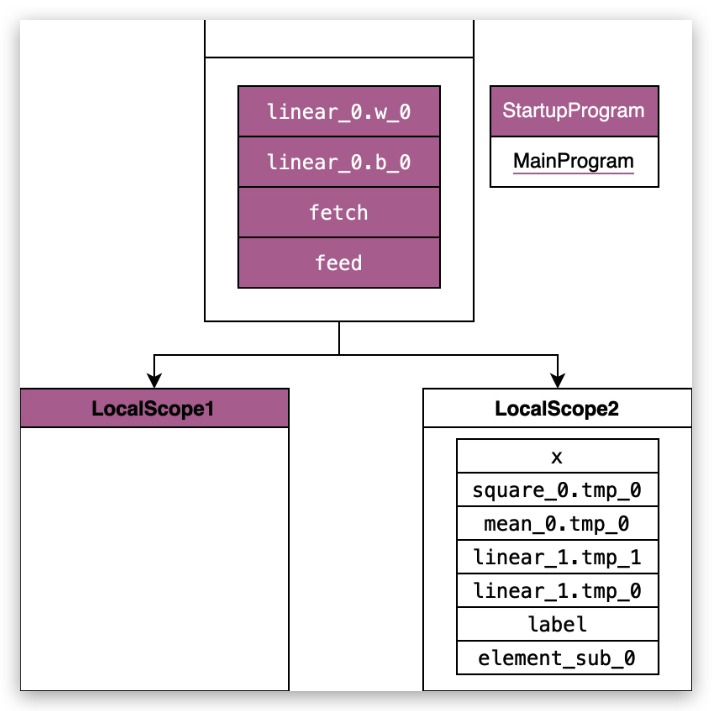
BuildVariableScope 遍历创建 block 的所有 VarDesc 并实例化为 Variable,加入到 scope 中。 scope 用于管理变量,op 在运行时从 scope 中查找输入和输出变量。
class Scope {
mutable std::unordered_map<std::string, std::unique_ptr<Variable>, KeyHasher> vars_;
mutable std::list<Scope*> kids_;
const Scope* parent_{nullptr};
}
scope 的底层数据结构是一个多叉树,树根这层用于保存 Parameter,也就是可训练的参数,第二层用于保存中间变量。一般执行器会默认传入的是树根这层,在树根的基础上自己创建一个 local_scope 并将运行期间产生的变量保存在 local_scope 中。
note
local_scope 这个设计有什么好处?
我们知道根 Scope 中有很多参数,比如模型的参数。这些数据一般是不会被删除的,在训练的过程中有一些临时变量是需要动态删除的,比如在训练过程中,我们会把一些临时变量放在 local_scope 中,这样在训练一轮后,可以把整个 local_scope 删除掉,这样就可以节省内存,也可以避免有些变量中漏删除的情况。
BuildOpFuncList
这一步的主要目标是确定运行时 Op 需要的一些信息,比如 kernel 选择。相关信息保存在数据结构 OpFuncNode 中。
OpFuncNode 的定义如下:
struct OpFuncNode {
int stream_priority_{0}; // lower value, higher priority
// fit for phi kernel
phi::Kernel* phi_kernel_{nullptr}; // not owned
platform::DeviceContext* dev_ctx_; // not owned
std::map<int, int> inplace_back_map;
std::map<std::string, std::vector<int>> input_index;
std::map<std::string, std::vector<int>> output_index;
std::shared_ptr<OperatorBase> operator_base_;
std::string execution_stream_{kDefaultStream};
OpFuncType type_; // 用于决定在哪个线程池上进行调度,一般根据 kernel.place 决定
OpKernelComputeFunc kernel_func_;
SchedulingPriority scheduling_priority_{0}; // lower value, higher priority
};
这一步的主要逻辑如下:
1、CreatorOps 为每个 Op 实例化对应的 OperatorBase
2、控制流 op 的内部变量的 gc 设置
如果前向 op 中的变量会被反向 op 用到,那么该变量最终会被设置为 skip_gc_vars,跳过 gc 步骤。
if (!used_for_jit) {
// If gc is enabled and block size > 1
const ProgramDesc& main_program = *block.Program();
operators::PrepareSafeEagerDeletionOnConditionalOpAndConditionalGradOp(
main_program, block.ID(), ops_unique);
operators::PrepareSafeEagerDeletionOnWhileOpAndWhileGradOp(
main_program, block.ID(), ops_unique);
operators::PrepareSafeEagerDeletionOnRecurrentOpAndRecurrentGradOp(
main_program, block.ID(), ops_unique);
}
3、 确定每个 op 执行结束后可以释放的变量的列表 unused_var_map
用于在预分析阶段进行变量 GC。从前向后遍历 op 的输入输出,更新变量的生存周期为相应 op 的 index。
std::unordered_map<const paddle::framework::OperatorBase*,
std::vector<std::string>>
GetUnusedVars(const BlockDesc& block,
const std::vector<std::shared_ptr<OperatorBase>>& ops) {
std::unordered_map<std::string, size_t> var_op_idx_map;
for (size_t i = 0; i < ops.size(); ++i) {
const auto& op = ops[i];
OpInOutInfo info;
// 判断输入是否可在此 op 执行后被回收
for (auto& name_pair : op->Inputs()) {
for (auto& name : name_pair.second) {
// 变量存在,不是可训练参数,类型为需要回收的类型
if (!var_can_be_deleted(name, block)) {
continue;
}
// 部分Op如reshape不需要具体的数据,只需要形状信息,
// 这时其输出变量的数据是不需要被回收的
if (!info.IsBuilt()) {
info.Build(op.get());
}
if (info.IsInArgBufferNeeded(name)) {
// Update the last living op of variable to current op
var_op_idx_map[name] = i;
} else {
<< name_pair.first << "(" << name << ") in Operator "
<< op->Type();
}
}
}
// 更新变量的存活周期
for (auto& name_pair : op->Outputs()) {
for (auto& name : name_pair.second) {
if (var_can_be_deleted(name, block)) {
// Update the last living op of variable to current op
var_op_idx_map[name] = i;
}
}
}
}
// 整理 name->op_index 到 op_index -> vector<name>
std::unordered_map<const OperatorBase*, std::vector<std::string>> result;
for (auto& name_op_idx_pair : var_op_idx_map) {
auto& name = name_op_idx_pair.first;
size_t op_idx = name_op_idx_pair.second;
auto op = ops[op_idx].get();
result[op].emplace_back(name);
}
return result;
4、 为每个 op 创建对应的 OpFuncNode
第一步需要创建 BuildVariableMap
VariableScope 的成员如下:
std::vector<Variable*> var_list_;
std::map<std::string, int> name2id_;
// 变量的引用计数和是否可以inplace、var_desc
std::vector<VariableMetaInfo> vec_meta_info_;
Scope* scope_{nullptr};
Scope* local_scope_{nullptr};
// var_name -> var_type
std::vector<std::pair<std::string, int>> data_transfer_added_vars_;
VariableScope 的作用和 scope 类似,区别在于它通过 vector 管理而非 map。
Convert
Convert 这一步主要完成了下面几件事情:
- 依赖分析,构建调度关系: Convert 需要对计算图进行解析和分析,构建出每个算子的调度关系和执行顺序,以保证正确的计算顺序和结果。它会将每个算子与它的输入和输出之间的依赖关系分析出来,以构建执行图。
- 计算变量生存周期: Convert 还需要分析计算图中每个变量在程序的哪个阶段使用,以确定它的生存周期,从而确定内存使用策略。例如,对于只在某个算子中使用的中间结果,可以采用动态内存分配策略,而对于前向传播结果和反向传播结果等持久化结果,则需要采用静态内存分配策略。
- 缓存 Context: 在执行模型之前,需要将模型中的变量传输到设备上,这个过程称为上下文转换,如从 CPU 到 GPU 或多 GPU 之间。 Convert 还需要缓存中间变量和算子的 Context,以加速上下文转换和提高模型的训练和推理效率。
- 运行时的依赖计数和引用计数: Convert 将根据构建执行图的依赖关系,为每个变量进行依赖计数和引用计数的设置。这样一来,当某个变量不再被使用时,可以及时回收对应的内存空间,从而避免内存泄漏问题。
在 Paddle 的代码里 Convert 的实现是在 InterpreterCore::Convert 里面,下面我们来分析一下这个函数的实现。
// 一些初始化工作,包括给 Op 分配 dev_ctx
// 用于分析Op间的依赖关系,帮助后续对Op执行进行调度,方便并发执行
BuildOperatorDependences();
stream_analyzer_.ConstructEvents(&vec_instruction_);
// 计算变量的生存周期
// 这里略去代码,详见后续分析
// 缓存Context
for (size_t i = 0; i < vec_instruction_.size(); ++i) {
BuildAndCacheInstructionCtx(&vec_instruction_[i]);
}
// 运行时的依赖计数和引用计数
for (auto& dep : dependecy_count_) {
deps_.emplace_back(std::make_shared<interpreter::OpDepInfo>(dep));
}
for (size_t i = 0; i < vec_meta_info.size(); ++i) {
refs_.emplace_back(std::make_shared<interpreter::VarRefInfo>(
vec_meta_info[i].var_ref_count_, var_scope_.VarRef(i)));
}
可以看到,Convert 主要完成了上面提到的四件事情,下面我们来分析一下这四件事情的具体实现。
BuildOperatorDependences
这一步的作用是进行依赖分析,最终目标是建立 Instruction 之间的 DAG图,便于后续并行调度。Instruction 中包含了上一步中建立的 OpFuncNode 作为成员变量,它是调度的一个基础单位。 Instruction 的图结构是一种邻接链表的方式存储的,每个节点存储他能到达邻居节点。我们希望确定如果一个 op 执行完了,接下来哪些 op 的输入准备好了,怎么去调度这些 op。
note
DAG 图是有向无环图(Directed Acyclic Graph)的简称,它是一种图论结构。DAG 图是一些点和线的集合,其中点表示计算或操作,线表示它们之间的依赖关系。
Instruction 的结构如下:
class Instruction {
...
private:
...
std::vector<size_t> next_instrs_in_different_thread;
std::vector<size_t> next_instrs_in_same_thread;
std::shared_ptr<EventInter> event_to_record_;
std::vector<EventInter> events_to_wait_;
OpFuncNode op_func_node_;
const platform::DeviceContext& dev_ctx_; // not owned
std::shared_ptr<RuntimeContext> runtime_ctx_;
std::shared_ptr<RuntimeInferShapeContext> infershape_ctx_;
std::shared_ptr<ExecutionContext> execution_ctx_;
std::vector<size_t> gc_check_vars_;
std::vector<std::pair<Variable*, Variable*>> vec_inplace_in_to_out_;
}
其中 next_instrs_in_different_thread 和 next_instrs_in_same_thread 分别表示不同线程和同一线程中下一个执行。 这些信息都会被用于构建执行图。
一个 Instruction 的后继节点按照这两个 Op 的关系被分为三类,这三类后继节点在调度时不会有特殊处理。这一步的最终目的就是完成这个数据结构的构建,用于后续的并行调度中。整体过程可以大致分为两步:
- 依赖分析:确定 Op 执行的先后关系
- 调度策略:确定后继节点的调度类型
void InterpreterCore::BuildOperatorDependences() {
// 依赖分析:构建节点之间的依赖关系,设置依赖计数和引用计数
// 获取节点的数量
size_t instr_num = vec_instruction_.size();
// 初始化节点的依赖计数和引用计数
dependecy_count_ = std::vector<size_t>(instr_num, 0);
// 调用 dependency_builder_ 对象的 Build 函数,确定 Op 执行的先后关系 构建节点之间的依赖关系
auto downstream_map = dependency_builder_.Build(vec_instruction_);
// 遍历每个节点,设置其对应的下一步节点列表和依赖计数
for (size_t instr_id = 0; instr_id < instr_num; ++instr_id) {
// 获取当前访问的节点
Instruction& cur_instr = vec_instruction_[instr_id];
// 获取当前节点的下一步节点列表
const std::set<size_t>& next_instr_ids = downstream_map[instr_id];
// 根据节点类型,将下一步节点分为同步和异步两种类型
if (FLAGS_new_executor_serial_run) {
// 在同一线程内运行的异步节点
for (size_t next_instr_id : next_instr_ids) {
cur_instr.AddNextInstrInSameThread(next_instr_id);
}
} else {
if (cur_instr.KernelType() == OpFuncType::kGpuAsync) {
// 异步运行的异步节点
for (size_t next_instr_id : next_instr_ids) {
if (vec_instruction_[next_instr_id].KernelType() ==
OpFuncType::kGpuAsync) {
cur_instr.AddNextInstrInSameThread(next_instr_id);
} else {
cur_instr.AddNextInstrInDifferentThread(next_instr_id);
}
}
} else {
// 同步运行的异步和同步节点
bool has_instr_in_same_thread = false;
for (size_t next_instr_id : next_instr_ids) {
if (!has_instr_in_same_thread &&
vec_instruction_[next_instr_id].KernelType() !=
OpFuncType::kGpuAsync) {
cur_instr.AddNextInstrInSameThread(next_instr_id);
has_instr_in_same_thread = true;
} else {
cur_instr.AddNextInstrInDifferentThread(next_instr_id);
}
}
}
}
// 确定op的依赖计数, 即入度数
for (size_t next_instr_id : next_instr_ids) {
++dependecy_count_[next_instr_id];
}
}
}
我们可以看到这段代码主要完成了以下几个任务:
- 对计算图进行依赖分析,构建节点之间的依赖关系,为每个算子设置相应的依赖计数和引用计数;
- 根据计算节点的类型(同步/异步),将下一步节点列表分为同步和异步两种类型;
- 确定 op 的依赖计数, 即入度数
依赖分析
下面我们来看一下依赖分析的具体实现。
const std::map<size_t, std::set<size_t>>& DependencyBuilder::Build(
const std::vector<Instruction>& instructions) {
if (is_build_) {
return op_downstream_map_;
}
instructions_ = &instructions;
op_num_ = instructions_->size();
ops_before_.assign(op_num_, {});
ops_behind_.assign(op_num_, {});
op_happens_before_.assign(op_num_, std::vector<bool>(op_num_, false));
// 主要目的是得到这样的一个数据结构 Dict[OpIndex -> IndexOfAllOpDependsOnIt]
// 这一步结束后已经具备了一个DAG图
BuildDownstreamMap();
// 去除DAG图中对调度而言不必要的边
ShrinkDownstreamMap();
// 部分Op会带来一些隐式依赖,如随机数算子(如uniform_random), 这些算子需要单独处理
if (FLAGS_new_executor_sequential_run) {
AddDependencyForSequentialRun();
}
AddDependencyForCoalesceTensorOp();
if (FLAGS_add_dependency_for_communication_op) {
AddDependencyForCommunicationOp();
}
AddDependencyForRandomOp();
AddDependencyForReadOp();
is_build_ = true;
return op_downstream_map_;
}
那么 DAG 是如何构建的呢? DAG 的构建主要遵循以下规则:
- 情况 1
A writes X
B reads X
then A -> B
- 情况 2
//some other ops writes X
A reads X
B writes X
then A -> B
此时依然要保证 A 在 B 前面执行,因为 A 读取的值不应该是 B 写入的值
- 情况 3
A writes X
//some other ops reads X
B writes X
then A -> B
在根据上述规则构建 DAG 图之后,我们还需要消去多余的依赖。比如我们构建了一个依赖边 a->b->c ,此时 c 依赖 a 和 b,但是只要保证它在 b 后面执行即可,不需要额外保证在 a 后面执行。因此保留依赖 a->b 和 b->c,去掉 a->c。
确认调度策略
在依赖分析完成之后,我们获得了一个 DAG 图。 之后我们需要确认调度的策略,看看那些 Op 是可以并行执行的,那些 Op 是需要串行执行的。
tip
什么情况下两个 Op 的执行需要同步?
当它们存在依赖关系又可能异步执行的时候,比如 A writes x, B reads x 这种关系的时候。这时候需要保证 B 执行的时候 A 已经执行完了。
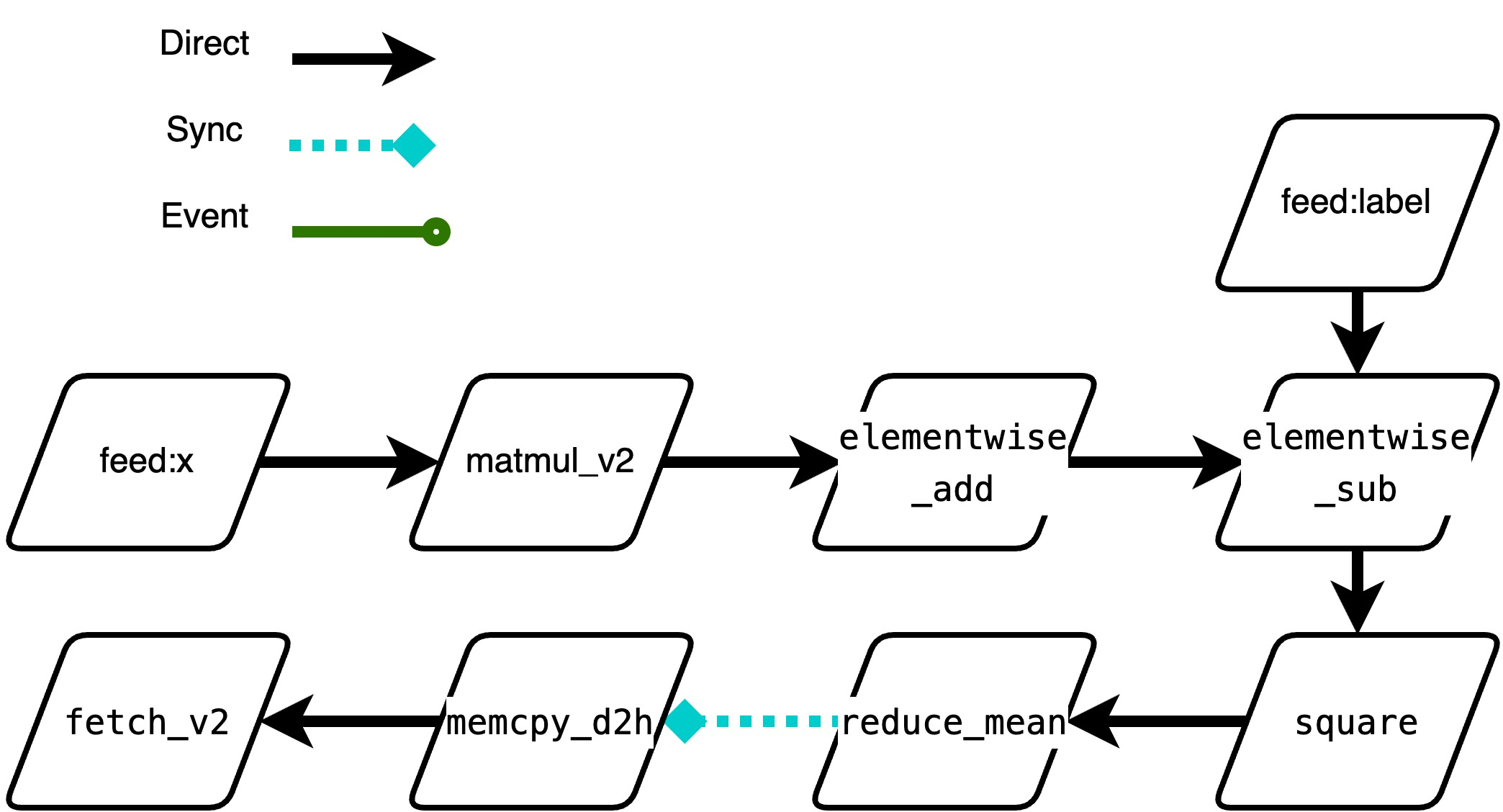
新执行器会按下面的分类把 Op 分为三类,后续调度时的逻辑略有不同。
- direct_run:串行情况,表示可以在当前线程直接拉起,不需要切换线程。目前包含如下 4 种情况:
a. GPU -> GPU(same stream) b. CPU -> CPU c. CPU -> H2D d. D2H -> CPU - synchornize_run: 并行,后续 Intruction 是个昂贵的同步等待操作,建议放到单独一个线程执行,如:
a. GPU -> D2H,因为 GPUKernel 很快拉起后,可能在 stream 排队,下游 D2H 需要等待数据,且此操作是个 sync 操作 - event_run:并行,后续 Instruction 与当前 Op 不属于一个 stream 流,需要额外处理
a. H2D -> GPU b. GPU -> GPU(different stream)
note
什么是 Events ???
小节
预分析阶段有三个主要任务:
- 静态化信息:context 缓存、运行时的数据类型转换改为插入 op、kernel 的选择
- 分析变量生命周期,确定在 op 执行结束后需要检查哪些变量的引用计数
- 依赖分析,确定在 op 执行结束后需要检查哪些 op 的依赖计数
调度执行阶段
InterpreterCore 在 build 结束后的执行逻辑中,需要关注的比较重要的部分要两点:
- 后继 op 的调度执行
- 多流同步下的显存回收
// lazy initialization of gc, do not create gc is the program only run once
if (!gc_) {
// 在这里面选择具体的 GC策略,由设备类型和 flag 控制
// 下面分析时考虑目前默认的 InterpreterCoreFastGarbageCollector 策略
gc_ = CreateInterpreterCoreGarbageCollector(place_, vec_instruction_);
}
interpreter::ResetAtomicGuard guard(&deps_, &refs_);
if ((execution_config_.used_for_jit || execution_config_.used_for_cinn) &&
(sync_op_num_ == 0)) {
VLOG(4) << "Tracing Instruction List";
TraceInstructionList(vec_instruction_);
} else {
VLOG(4) << "Non-tracing";
// For the program that only run once, it is no need to
// create work_queue, so the async_work_queue_ is created
// until the second step run.
async_work_queue_ = GetWorkQueue();
ExecuteInstructionList(vec_instruction_);
}
note
什么是 GC ?
GC (Garbage Collection,垃圾回收)策略是指在计算机程序中,用于管理动态分配的内存的策略。在许多编程语言中,程序员需要手动分配和释放内存。如果程序员不合理地分配或释放内存,可能会导致内存泄漏或指针错误等问题。而垃圾回收机制则可以自动地管理内存分配和释放过程,使得程序员无需手动管理内存,并且程序的内存使用更加稳定可靠。
note
Paddle 中的 GC 策略是什么样的?
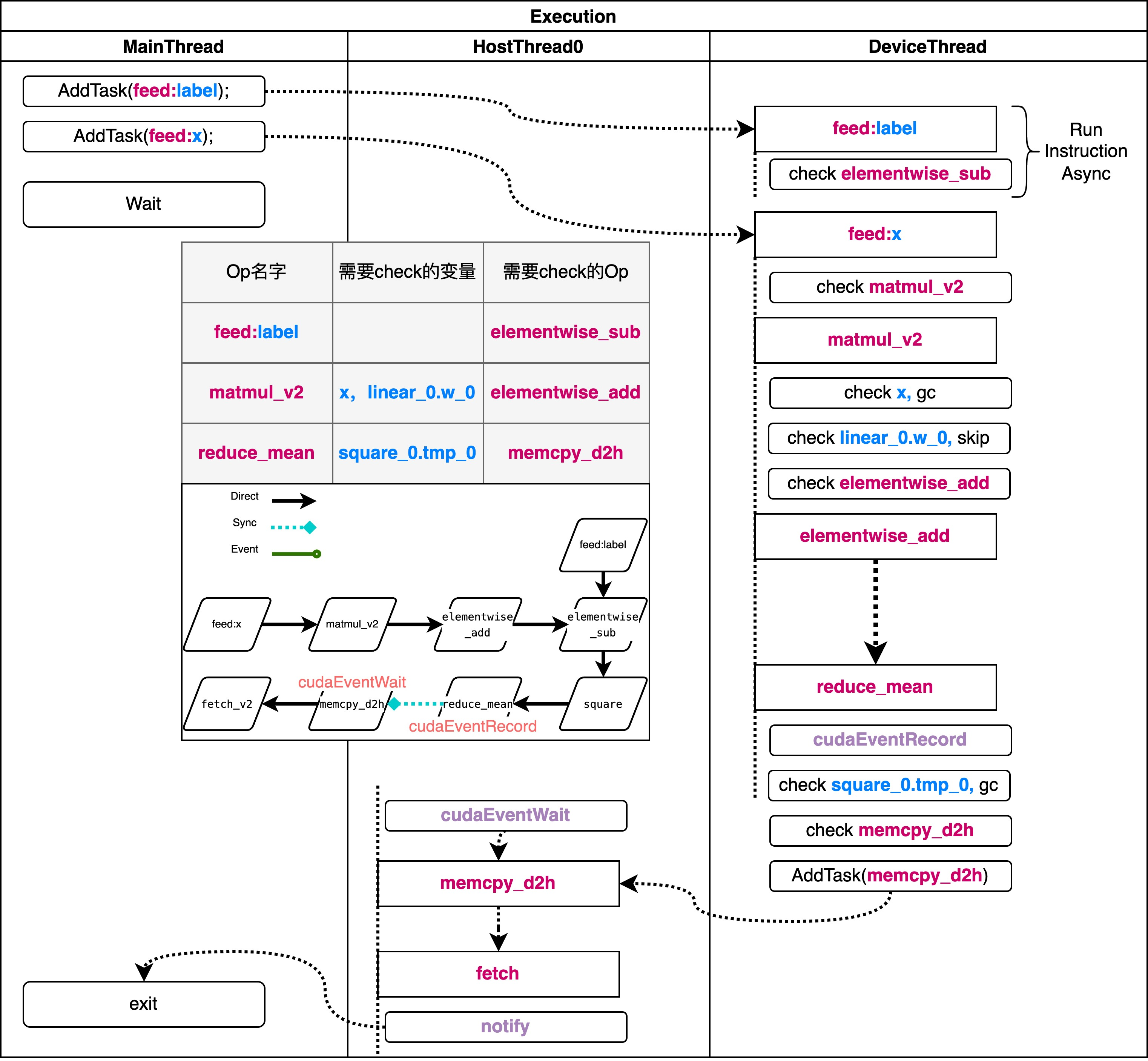
Op 的整体调度过程
启动过程的代码如下
void InterpreterCore::ExecuteInstructionList(
const std::vector<Instruction>& vec_instr) {
unfinished_op_number_ = vec_instr.size();
if (unfinished_op_number_ == 0) {
VLOG(4) << "No op to run, return";
return;
}
exception_holder_.Clear();
for (size_t i = 0; i < dependecy_count_.size(); ++i) {
if (dependecy_count_[i] == 0) {
// 记录从设备到主机的数据传输(D2H)
RecordMemcpyD2H(vec_instr.at(i));
if (FLAGS_new_executor_serial_run) {
RunInstructionAsync(i);
} else {
// 运行异步 op
async_work_queue_->AddTask(vec_instr.at(i).KernelType(),
[this, i] { RunInstructionAsync(i); });
}
}
}
// 进入阻塞状态,等待其他线程的完成
auto event_name = main_thread_blocker_.WaitEvent();
VLOG(1) << "main_thread_blocker_(" << &main_thread_blocker_
<< ") got event_name: " << event_name;
// 异常处理部分省略 ...
}
这里的执行可以分为三步:
- 初始化工作,包括重置运行时依赖计数和引用计数的
dynamic_ref_ - 将每个一开始就可以执行的 Op 加入执行队列,具体运行每个 Op 的函数是 RunInstructionAsync
- 等待所有任务运行完成。这里会调用
main_thread_blocker_.WaitEvent进入阻塞,等待其他线程发现任务执行完成或失败后再退出
对于新执行器而言,他可以多线程地并发执行多个 Op,这里的 async_work_queue_ 会将op调度到不同的线程上。workqueue 的底层结构是线程池,线程池进行调度。 特殊之处在于新执行器会有两个不同的线程池,分别用于设备线程和 host 线程。线程池负责调度执行已经加入队列的任务,具体的执行的逻辑为 RunInstructionAsync ,它是线程循环执行的函数。 下面我们来看一下 RunInstructionAsync 的实现逻辑:
void InterpreterCore::RunInstructionAsync(size_t instr_id) {
SchedulingQueue ready_ops(instruction_scheduling_priority_less);
ready_ops.push(instr_id);
while (!ready_ops.empty()) {
instr_id = ready_ops.top();
ready_ops.pop();
auto& instr_node = vec_instruction_.at(instr_id);
// 执行单个Op的具体逻辑,具体见下一节分析,对op的调度执行不关键
RunInstruction(instr_node);
if (UNLIKELY(exception_holder_.IsCaught())) {
VLOG(4) << "Exception caught";
if (exception_notifier_ != nullptr) {
exception_notifier_->NotifyEvent();
}
return;
}
VLOG(4) << "unfinished_op_number_: " << unfinished_op_number_;
if (UNLIKELY(unfinished_op_number_.fetch_sub(
1, std::memory_order_relaxed) == 1)) {
if (completion_notifier_ != nullptr) {
completion_notifier_->NotifyEvent();
}
}
RunNextInstructions(instr_node, &ready_ops);
}
}
可以看到这里首先在一个空的执行队列中压入当前需要执行的 Op,然后开始执行 for 循环,运行当前 op,在运行完成后这里如果发现现在没有需要执行的 Op 了,那么就会调用 notify,通知其他线程和主线程结束。如果还有未完成 Op,进入RunNextInstructions,向执行队列中加入新的 Op 或把他们调度到别的地方去。
void InterpreterCore::RunNextInstructions(const Instruction& instr,
SchedulingQueue* reserved_next_ops) {
platform::RecordEvent record(
"RunNextInstructions", platform::TracerEventType::UserDefined, 10);
// 用于判断下一个 Op 是不是准备好了
// 通过其依赖计数判断。不管判断成不成功,依赖计数都会减一
auto IsReady = [this](size_t next_id) {
VLOG(4) << "op_id: " << next_id
<< ", remain deps: " << deps_[next_id]->DynamicDep();
return deps_[next_id]->CheckAndDecrease();
};
// 在其他线程中的
for (size_t next_instr_id : instr.NextInstrsInDifferenceThread()) {
if (IsReady(next_instr_id)) {
async_work_queue_->AddTask(
vec_instruction_[next_instr_id].KernelType(),
[this, next_instr_id]() { RunInstructionAsync(next_instr_id); });
}
}
// 在相同线程中的
for (size_t next_instr_id : instr.NextInstrsInSameThread()) {
if (IsReady(next_instr_id)) {
reserved_next_ops->push(next_instr_id);
}
}
}
在进行调度的时候, 会根据 Op 的类型,将 Op 分为两类,一类是在同一个线程中执行的,一类是在不同线程中执行的。对于同一个线程中执行的 Op,会将其加入到 reserved_next_ops 中,等待下一次调度。对于不同线程中执行的 Op,会将其加入到 async_work_queue_ 中,等待线程池调度执行。
note
和原来的有什么不同? 为什么要进行这样的修改?
单个 Op 的执行过程
这部分逻辑位于 RunInstructionAsync 中,但是和调度无关。下面是相关代码:
void InterpreterCore::RunInstruction(const Instruction& instr_node) {
VLOG(5) << ...;
auto* op = instr_node.OpBase();
platform::RecordEvent instruction_event(
op->Type(), platform::TracerEventType::Operator, 1);
SetDeviceId(instr_node.DeviceContext().GetPlace());
try {
// 判断Op的前置要求是否完成
// 与前面对stream的分析有关,执行cudaEventWait
instr_node.WaitEvent(place_);
if (!instr_node.IsArtificial()) {
// 运行Op的主体部分
RunOperator(instr_node);
// 回收变量
CheckGC(instr_node);
// 记录表明Op已经完成
interpreter::LogDeviceMemoryStats(place_);
}
instr_node.RecordEvent(place_);
} catch ... // 略去异常处理的代码
}
首先我们先来分析一下 RunOperator :
void InterpreterCore::RunOperator(const Instruction& instr_node) {
auto* op = instr_node.OpBase();
auto place = instr_node.DeviceContext().GetPlace();
Scope* local_scope = HasLocalScope() ? var_scope_.GetMutableLocalScope()
: var_scope_.GetMutableScope();
VLOG(4) << "Start run " << place << " " << op->DebugStringEx(local_scope);
auto op_with_kernel = dynamic_cast<const framework::OperatorWithKernel*>(op);
{
// If it is OperatorBase, InferShape do nothing.
if (op_with_kernel != nullptr) {
platform::RecordEvent infershape_event(
"infer_shape",
platform::TracerEventType::OperatorInner,
1,
platform::EventRole::kInnerOp);
// see OperatorWithKernel::RunImpl in operator.cc for why
if (!(op_with_kernel->HasAttr(kAllKernelsMustComputeRuntimeShape) &&
op_with_kernel->Attr<bool>(kAllKernelsMustComputeRuntimeShape))) {
op_with_kernel->Info().infer_shape_(
instr_node.InnerInferShapeContext().get());
}
infershape_event.End();
platform::RecordOpInfoSupplement(op->Type(),
op->Attrs(),
*(instr_node.InnerInferShapeContext()),
*(instr_node.InnerRuntimeContext()),
op->Id());
}
}
if (op_with_kernel != nullptr && FLAGS_new_executor_use_inplace) {
// TODO(xiongkun03) Does operator base support inplace ?
for (auto& pair : instr_node.InplaceInfo()) {
const auto& in = paddle::framework::details::GetTensorFromVar(pair.first);
auto* out =
paddle::framework::details::GetMutableTensorFromVar(pair.second);
if (in.dims() == out->dims()) {
out->ShareBufferWith(in);
}
}
}
{
platform::RecordEvent compute_event(
"compute",
platform::TracerEventType::OperatorInner,
1,
platform::EventRole::kInnerOp);
if (op_with_kernel == nullptr) { // operator base
instr_node.OpBase()->Run(*local_scope, place_);
} else {
phi::Kernel* kernel = instr_node.PhiKernel();
if (kernel && kernel->IsValid()) { // phi kernel
if (kernel->GetKernelRegisteredType() ==
phi::KernelRegisteredType::FUNCTION) {
VLOG(4) << "Run function kernel: " << op->Type();
VLOG(4) << instr_node.InnerRuntimeContext().get() << " "
<< &instr_node.DeviceContext();
phi::KernelContext phi_kernel_context;
op_with_kernel->BuildPhiKernelContext(
*instr_node.InnerRuntimeContext().get(),
const_cast<platform::DeviceContext*>(&instr_node.DeviceContext()),
&phi_kernel_context);
(*kernel)(&phi_kernel_context);
} else {
VLOG(4) << "Run structure kernel: " << op->Type();
(*kernel)(instr_node.InnerExecutionContext().get());
}
} else { // fluid kernel
instr_node.KernelFunc()(*instr_node.InnerExecutionContext().get());
}
}
}
VLOG(4) << "End run " << place << " " << op->DebugStringEx(local_scope);
if (!instr_node.InplaceBackMap().empty()) {
platform::RecordEvent inplaceback_event(
"InplaceVarsBack", platform::TracerEventType::UserDefined, 10);
auto& m = instr_node.InplaceBackMap();
// NOTE(zhiqiu): same logic as TransferInplaceVarsBack() in operator.cc
for (auto& p : m) {
auto* transformed_tensor = GetMutableLoDTensorOrSelectedRowsValueFromVar(
var_scope_.VarRef(p.first));
auto* original_tensor = GetMutableLoDTensorOrSelectedRowsValueFromVar(
var_scope_.VarRef(p.second));
original_tensor->ShareDataWith(*transformed_tensor);
VLOG(4) << "Transfer inplace variable back form "
<< var_scope_.GetNameById(p.first) << " to "
<< var_scope_.GetNameById(p.second);
}
}
/*For profiling/benchmark only*/
if (FLAGS_benchmark) {
instr_node.DeviceContext().Wait();
#if defined(PADDLE_WITH_CUDA) || defined(PADDLE_WITH_HIP)
PADDLE_ENFORCE_GPU_SUCCESS(platform::GpuGetLastError());
VLOG(4) << "Operator(" << op->Type()
<< "): context wait and get last error";
#endif
}
// for debug nan/inf
if (op_with_kernel != nullptr && FLAGS_check_nan_inf) {
VLOG(4) << "Check nan/inf";
framework::details::CheckOpHasNanOrInf(
*op,
*local_scope,
place); // TODO(xiongkun03) change it to inner scope.
}
}
具体来说,它首先获取当前算子以及它所需要运行的设备;然后根据算子是否有 kernel,分别进行 shape 推导和计算
它执行以下几个步骤:
- 首先通过 instrnode 获取需要运行的 operator,并获取它所需要的设备。
- 根据此 operator 的类型,判断它是否具有 kernel。
- 如果不是
OperatorWithKernel类型,则说明此operator不需要运行 kernel,只需要运行RunImpl函数即可。 - 如果是
OperatorWithKernel类型,则需要进行 shape 推导和计算, 运行 infershape 函数推导出每个输入输出的 shape。若该 operator 的所有 kernel 都必须计算 runtime shape,则直接跳过 shape 推导。最后通过platform::RecordOpInfoSupplement函数收集关于此 operator 的信息,供后续跟踪和调试。
- 如果不是
- 根据命令行参数 FLAGS_newexecutor_use_inplace 判断是否启用 inplace。 若启用,则将所有 inplace 的变量的结果从 transformed_tensor 转移回 original_tensor。
- 运行 operator 的 kernel 函数。如果 operator 没有 kernel,直接运行 Run 函数。 如果 operator 有 kernel:若 kernel 是
phi::kernel,则需要检查它是否是函数类型,然后分别为执行上下文和 kernel 构建 phi kernel context。如果不是 phi kernel,则直接运行 kernel 的运算函数。 - 将 inplace 变量的结果传回 original_tensor。
可以看到新执行器在 Op 运行时少了很多准备工作,这里主要是 Context 的准备和数据转换相关逻辑。 接下来分析 GC 部分 CheckGC 。
void InterpreterCore::CheckGC(const Instruction& instr) {
// 检查是否要进行垃圾回收,并记录事件
platform::RecordEvent record(
"CheckGC", platform::TracerEventType::UserDefined, 10);
// 如果定义了 PADDLEWITHCUDA 或 PADDLEWITHHIP,则调用 RecordStreamForGC 函数
#if defined(PADDLEWITHCUDA) || defined(PADDLEWITHHIP)
RecordStreamForGC(instr);
#endif
auto& varscope = varscope;
// 遍历所有需要进行垃圾回收的变量
for (auto varid : instr.GCCheckVars()) {
// 打印当前变量名、变量 ID 和引用数量
VLOG(4) << "GC:" << varscope.GetNameById(varid) << ", id:" << varid
<< ", ref:" << refs[varid]->DynamicRef();
// 减少该变量的引用计数并返回是否可以进行删除
bool isready = refsvar_id->CheckAndDecrease();
// 如果该变量属于持久变量,则直接跳过
if (varscope.VarDesc(varid) && varscope.VarDesc(varid)->Persistable()) {
continue;
}
// 如果可以进行删除,则异步删除该变量
if (isready) {
VLOG(6) << "Async delete variable with name : "
<< varscope.GetNameById(varid);
gc->Add(refs[varid]->Var(), instr);
}
}
}
这里的代码主要包含两部分:
Record StreamGC,为了多流下的FastGC服务- 更新变量的引用计数,回收引用计数为 0 的变量
代码中 RecordStreamGC 为了 提前回收显存服务 的。如果 kernel1 和 kernel2 使用同一个 stream 执行,那么在 kernel1 还没跑完的时候就可以标记 kernel1 使用的内存已经被释放,然后 kernel2 就可以直接使用这部分显存。这样做的前提是要保证释放的显存不会分配给其他 kernel 使用,因此这里在分配内存时,不同 stream 会有不同的独立显存块分配。 ???
新执行器默认会的 GC 策略 FastGC 会在 Op 执行结束后回收变量,对于异步类型的 Op 而言,上面提到提前释放不需要特殊实现就可实现,但是注意到这种提前释放需要一个重要前提,就是前后的 kernel 必须使用同一个 stream 执行。 如果 stream 是同一个,那么这里不需要做特殊处理,直接 GC 回收即可。但是如果 stream 不是同一个,那么就需要插入 cudaEvent 同步。
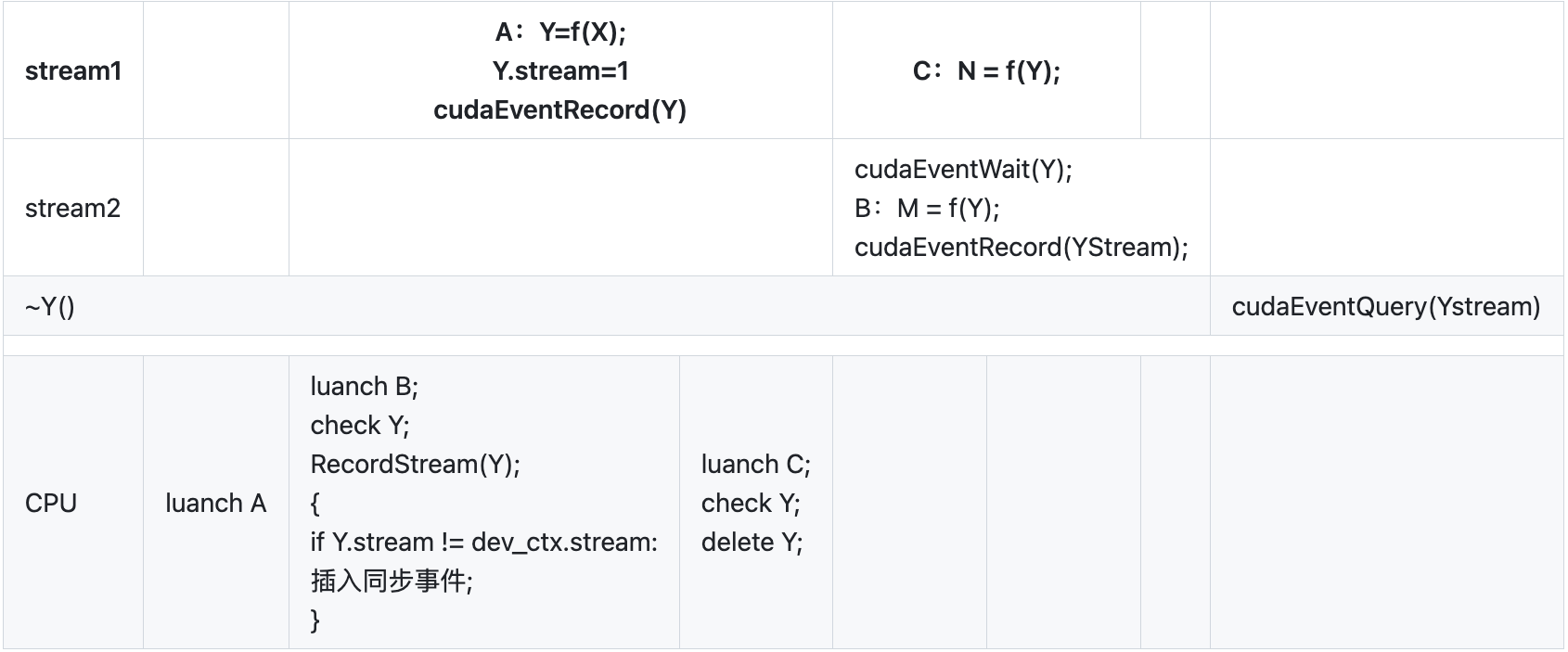
多流同步实例
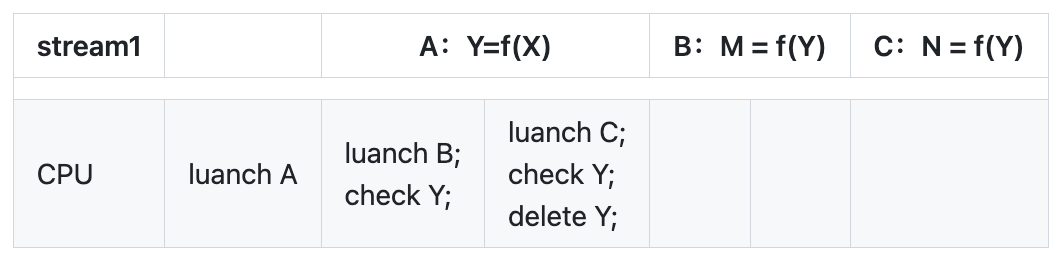
1、同一个 stream 的 FastGC
A:Y = f(X)
B: M = f(Y)
C: N = f(Y)
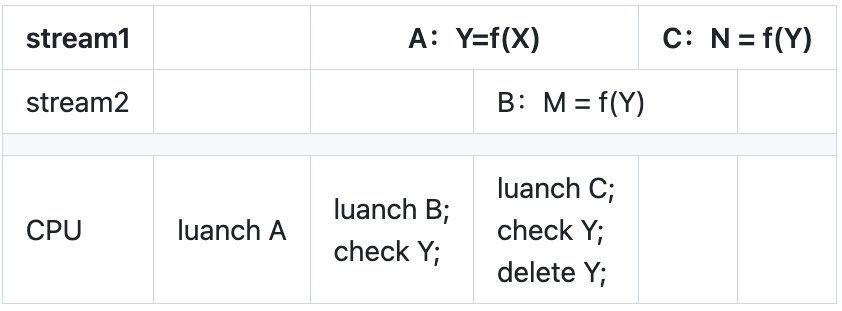
2、不同 stream 直接 FastGC 引起的冲突
3、A->B、A->C stream_ananlyser 插入同步事件的逻辑
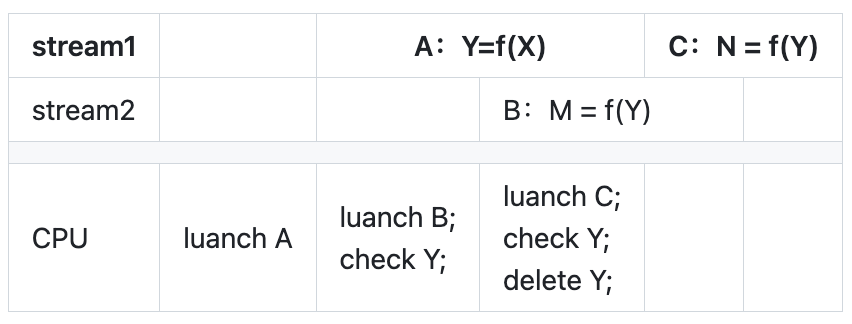
注意到上面的例子中有个问题,M = fc(Y) 在 Y=fc(X) 未执行完之前就开始执行了,这种情况下调度的正确性是由之前的stream_ananlyser` 来保证的。 举例来说,这里检测到 Y 和 M 有依赖关系,而它们的 stream 又不是同一个,就会插入 cudaEvent 进行同步。
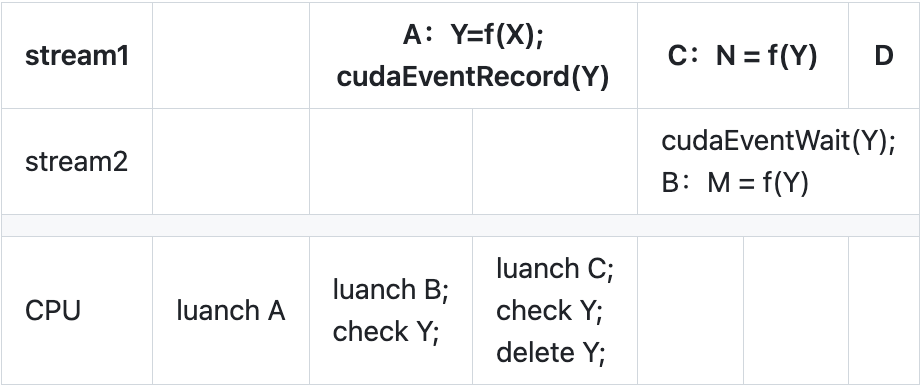
4、A->B、A->C RecordStreamGC 插入同步事件的逻辑
小节
1、调度后继 op,将其加入到对应类型的线程池中
2、 执行算子
3、回收变量
4、对于跨流的特殊处理